- Sonar
Jonas Klose | Oktober – November 2018 Einleitung Da der Arbeitsauftrag darin bestand ein Projekt mit Mikrokontroller durchzuführen und ich kurz zuvor ein kleines Projekt mit einem Ultraschallsensor vorgestellt bekommen hatte, wollte ich eine erweiterte Version davon bauen. Besonderen Fokus lege ich auf eine bessere Darstellung der Messergebnisse, da bei der Vorlage nur eine kleine LED-Reihe den momentanen Messwert anzeigte. Die Hauptaufgabe ist also der Aufbau eines automatisch bewegten Ultraschallsensors mit der Auswertung und Übertragung der …
- Automatisiertes Kettenfahrzeug
automatische Erkennung von Wänden und Fahrtrichtungsänderung Julian Biber, Andre Felten | März – Juni 2019 Aufagbenstellung Pflichtaufgaben Die Aufgabe besteht darin, ein Fahrzeug zu bauen, welches in der Lage ist, eine Verlangsamung der Fortbewegungsgeschwindigkeit und folgend eine Fahrtrichtungsumschaltung durchzuführen, sobald jeweils eine bestimmte Entfernung zu einem Hindernis unterschritten wird. Dies wird hinsichtlich des EVA-Prinzips (Eingabe, Verarbeitung, Ausgabe) folgend umgesetzt: Eingabe Die Eingabe dient zur Auswertung der Umwelt, sodass Analoge Distanzen zu digitalen Werden umgewandelt werden können. …
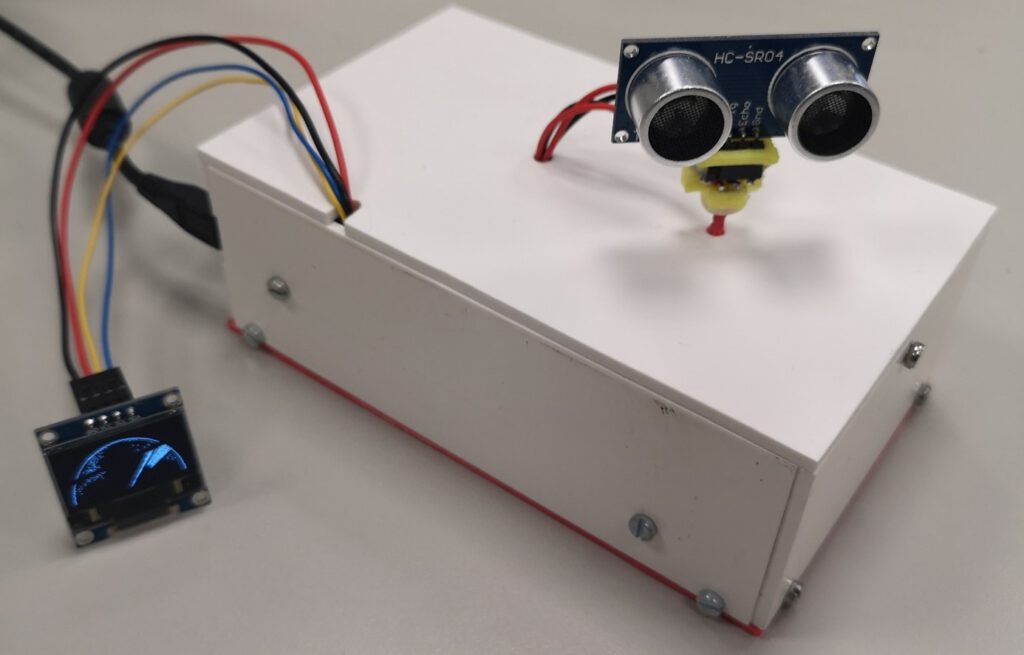 Jonas Klose | Oktober – November 2018 Einleitung Da der Arbeitsauftrag darin bestand ein Projekt mit Mikrokontroller durchzuführen und ich kurz zuvor ein kleines Projekt mit einem Ultraschallsensor vorgestellt bekommen hatte, wollte ich eine erweiterte Version davon bauen. Besonderen Fokus lege ich auf eine bessere Darstellung der Messergebnisse, da bei der Vorlage nur eine kleine LED-Reihe den momentanen Messwert anzeigte. Die Hauptaufgabe ist also der Aufbau eines automatisch bewegten Ultraschallsensors mit der Auswertung und Übertragung der …
Jonas Klose | Oktober – November 2018 Einleitung Da der Arbeitsauftrag darin bestand ein Projekt mit Mikrokontroller durchzuführen und ich kurz zuvor ein kleines Projekt mit einem Ultraschallsensor vorgestellt bekommen hatte, wollte ich eine erweiterte Version davon bauen. Besonderen Fokus lege ich auf eine bessere Darstellung der Messergebnisse, da bei der Vorlage nur eine kleine LED-Reihe den momentanen Messwert anzeigte. Die Hauptaufgabe ist also der Aufbau eines automatisch bewegten Ultraschallsensors mit der Auswertung und Übertragung der …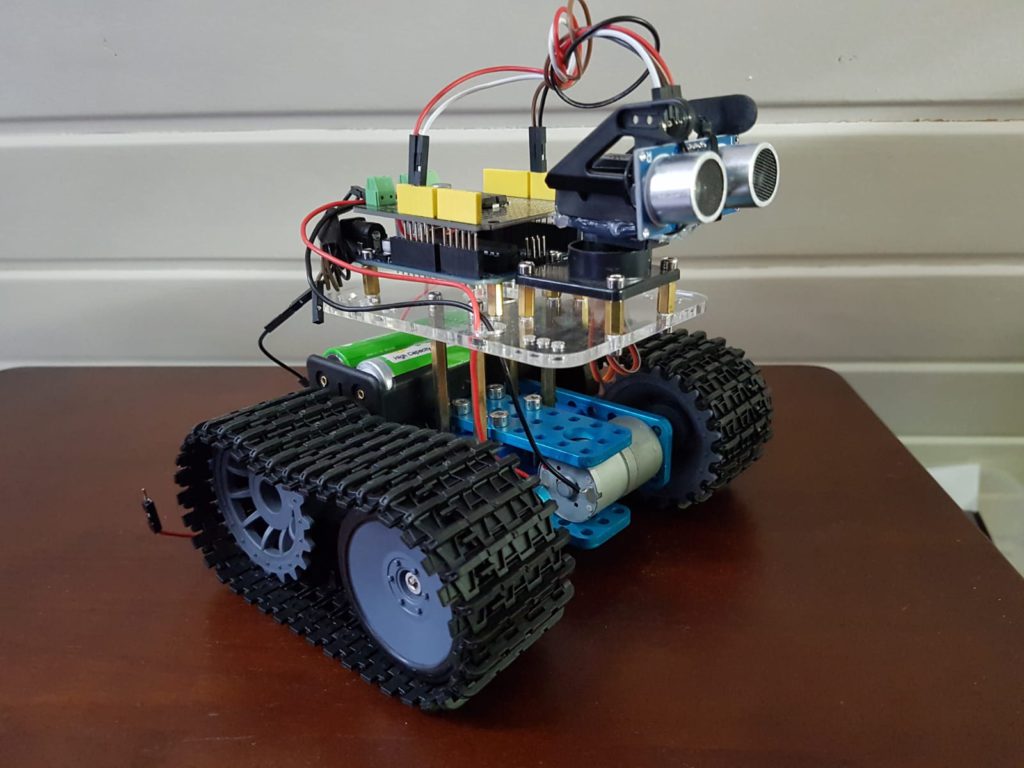 automatische Erkennung von Wänden und Fahrtrichtungsänderung Julian Biber, Andre Felten | März – Juni 2019 Aufagbenstellung Pflichtaufgaben Die Aufgabe besteht darin, ein Fahrzeug zu bauen, welches in der Lage ist, eine Verlangsamung der Fortbewegungsgeschwindigkeit und folgend eine Fahrtrichtungsumschaltung durchzuführen, sobald jeweils eine bestimmte Entfernung zu einem Hindernis unterschritten wird. Dies wird hinsichtlich des EVA-Prinzips (Eingabe, Verarbeitung, Ausgabe) folgend umgesetzt: Eingabe Die Eingabe dient zur Auswertung der Umwelt, sodass Analoge Distanzen zu digitalen Werden umgewandelt werden können. …
automatische Erkennung von Wänden und Fahrtrichtungsänderung Julian Biber, Andre Felten | März – Juni 2019 Aufagbenstellung Pflichtaufgaben Die Aufgabe besteht darin, ein Fahrzeug zu bauen, welches in der Lage ist, eine Verlangsamung der Fortbewegungsgeschwindigkeit und folgend eine Fahrtrichtungsumschaltung durchzuführen, sobald jeweils eine bestimmte Entfernung zu einem Hindernis unterschritten wird. Dies wird hinsichtlich des EVA-Prinzips (Eingabe, Verarbeitung, Ausgabe) folgend umgesetzt: Eingabe Die Eingabe dient zur Auswertung der Umwelt, sodass Analoge Distanzen zu digitalen Werden umgewandelt werden können. …